

After spending several months preparing our ocean gliders activities very carefully (see http://greenedge-expeditions.com/takuvik-glider-team-carries-test-deployments-slocum-gliders/), we finally left Quebec city on board the Amundsen icebreaker. We spent the entire week of transit making final preparations for deployment. We installed all the communication gear. We measured what we call the dark offsets of each of the scientific sensors (i.e. the baseline noise measurements). We ran, for the nth time, simulated missions under a virtual ice floe (either the gliders have this capability of simulating missions, or we use a pocket-sized computer which is identical to that inside the glider).





We arrived to the Baffin Bay…
Here we are, finally, in the Baffin Bay, with our two gliders, “Qala1” and “Qala2”, on board the CCGS Amundsen. We are excited, a little bit like kids with brand new toys! We are at our first Green-Edge 2016 station, which is located in the open water, i.e. in the Eastern part of Baffin Bay, close to the Greenland Coasts.
Our goal is to deploy one of our two gliders here, as well as test our under-ice mission, but first in open water. As the Marginal Ice Zone (that we usually call the MIZ) is on our West side, we’ll fly our glider East, and pretend there is an ice floe there. If everything runs smoothly, i.e. with no abort or error, then we’ll feel confident to fly our glider West in the MIZ and then under the ice!
We need to deploy the gliders from small boats (the barge or the zodiac) as we need to get close to them several times before letting them go. Unfortunately, the weather is not on our side, at all! We are not authorized nor we would like to deploy the annex boats, as the waves are too high, and there is a rather large swell and lots of wind! We are not the only ones for which the capricious weather is embarrassing. Many operations at sea are either cancelled, postponed, or re-organized on a last-minute call, but after all, nothing very unusual during an oceanographic cruise!
Deployment of the first Glider
As the days pass, the weather is not improving, but the icebreaker is nevertheless progressing toward the ice floe, westward. The gliders are originally designed to fly in open waters, as they need to surface every now and then for communication and geo-localization. So, as we cannot deploy the gliders form an ice-infested area, if the ship is entering the MIZ, we would have to keep them on board for a long period, a few days at least, until the ship sails in open waters again. So we decide to try to sail very close the MIZ, to assess the ice and weather conditions there. It’s much more West than where we were expecting to deploy our 1st glider, but there we discover that the ice chunks are acting as a shelter, and that only a rather large but long swell remains, with barely no wind waves any more, and with a wind going eastward.
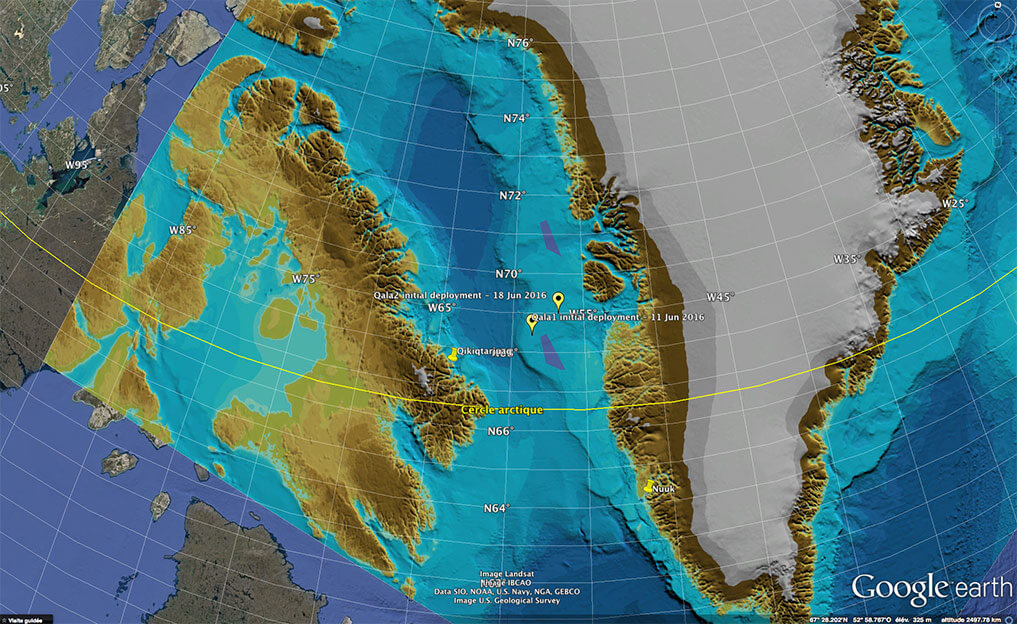
So decision is taken to deploy Qala1 as soon as possible. For that, we need to work through the night to get the final configuration sent to the glider and complete the final test checklist. And after an hour of sleep, here we are, on the zodiac, close to the MIZ, with Qala1 and few tools and communication gear. On the map below, you can see where Qala1 was deployed on 11 June, just before the Amundsen is entering the ice floe. Phew!



Qala 2, the second glider at sea!
Things are a little bit similar for our second glider, Qala2. Indeed, the initial plan was to deploy it during the second half of the leg 1, i.e. after the stopover in Qikiqtarjuaq. But as the deployment of Qala1 is running very smoothly (see below), decision is taken to deploy Qala2 before the ship enters the ice floe toward Qikiqtartjuaq. Again, the weather is not very cooperative, so one more time, we have to deploy Qala2 quite close to the MIZ, but we are used to it by now, aren’t we? Qala2 was deployed on 18 June. The map below shows the locations where Qala1 and Qala2 have been deployed.



Since their deployments, the gliders behave very well, we haven’t experienced any major issue, apart from two underwater light sensors. Unfortunately, on both gliders, the light sensors are sending nearly regularly corrupted data streams, and as a hard-coded safety feature on the science computer shuts down processing of all sensors after 50 corrupted measurements from any single sensor, we decide to sacrifice these light sensors for the sake of the others science sensors. We are still investigating this issue, as during our tests in Halifax, we did not experience this “bad behavior” on the part of the light sensors. Maybe they have never been tested in seawater close to the freezing point (-1.8° C)?
Want to see the data?
